
Page 26 - Kontrollorhandboka
P. 26
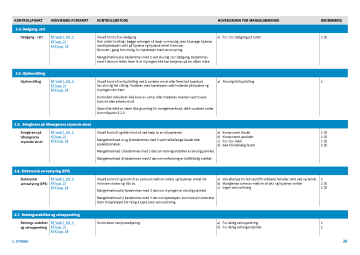
KONTROLLPUNKT
HENVISNING FORSKRIFT
KONTROLLMETODE
HOVEDGRUNN FOR MANGELMERKNAD
BEDØMMING
2.3. Dødgang, ratt
Dødgang - ratt
2.4. Hjulinnstilling
Hjulinnstilling
BF Vedl.1, KO: 5 KF kap. 21
KTK kap. 18
BF Vedl.1, KO: 5 KF kap. 21
KTK kap. 18
Visuell kontroll av dødgang.
Drei rattet forsiktig i begge retninger så langt som mulig uten å bevege hjulene, med kjøretøyets vekt på hjulene og hjulene rettet framover.
Motoren i gang hvis mulig, for kjøretøyer med servostyring.
Mangelmerknad a) bedømmes med 2 ved alvorlig stor dødgang, bedømmes med 3 dersom feilen fører til at styringen ikke kan betjenes på en sikker måte.
Visuell kontroll av hjulstilling ved å vurdere om et eller flere hjul åpenbart har alvorlig feil stilling. Vurderes med kjøretøyets vekt hvilende på hjulene og styringen rett frem.
Kontrollen inkluderer ikke bruk av utstyr eller målebrev hverken ved hoved- kontroll eller etterkontroll.
Skjevslitte dekk er alene ikke grunnlag for mangelmerknad, dekk vurderes under kontrollpunkt 5.2.3.
Visuell kontroll og/eller kontroll ved hjelp av en slitasjetester.
Mangelmerknad a) og b) bedømmes med 3 ved trafikkfarlige skader eller sprekkdannelser.
Mangelmerknad c) bedømmes med 3 dersom retningsstabilitet er alvorlig påvirket. Mangelmerknad d) bedømmes med 3 dersom innfestning er trafikkfarlig svekket.
Visuell kontroll og kontroll av samsvar mellom rattets og hjulenes vinkel når motoren startes og slås av.
Mangelmerknad b) bedømmes med 3 dersom styringen er alvorlig påvirket.
Mangelmerknad c) bedømmes med 3 dersom kjøretøyets konstruksjon/størrelse fører til kjøretøyet blir farlig å kjøre uten servovirkning.
Kontrolleres ved prøvekjøring.
a) For stor dødgang på rattet
2 (3)
a) Alvorlig feil hjulstilling
2
2.5. Svingkrans på tilhengerens styrende aksel
Svingkrans på tilhengerens styrende aksel
BF Vedl.1, KO: 5 KF kap. 21
KTK kap. 18
a) Komponent skadet
b) Komponent sprukket c) For stor slakk
d) Ikke tilstrekkelig festet
a) Varsellampe for feil ved EPS indikerer feil eller svikt ved systemet b) Manglende samsvar mellom rattets og hjulenes vinkler
c) Ingen servovirkning
a) For dårlig selvoppretting b) For dårlig retningsstabilitet
2 (3) 2 (3) 2 (3) 2 (3)
2
2 (3) 2 (3)
2 2
2.6. Elektronisk servostyring (EPS)
Elektronisk BF Vedl.1, KO: 5 servostyring (EPS) KF kap. 21
KTK kap. 18
2.7. Retningsstabilitet og selvoppretting
Retnings stabilitet og selvoppretting
BF Vedl.1, KO: 5 KF kap. 21
KTK kap. 18
2. STYRING
26
